
Robot module overview
The robot module is an interface over real or simulated robots.
The source code documentation shows which are the corresponding classes part of robot module.
This module uses optional third-party libraries to enable some capabilities. ![]()
Real robots interfaces working everywhere
|
 |
| Pioneer P3-DX mobile robot. | |
|
 |
| Virtuose 6D haptic device |
Real robots interfaces working only at Inria
Since the low level drivers of these robots are not open-source, the following robot interfaces can only be used at our lab. For those who want to interface their own robots, the corresponding classes implemented in ViSP could give a good idea on what has to be implemented.
 |
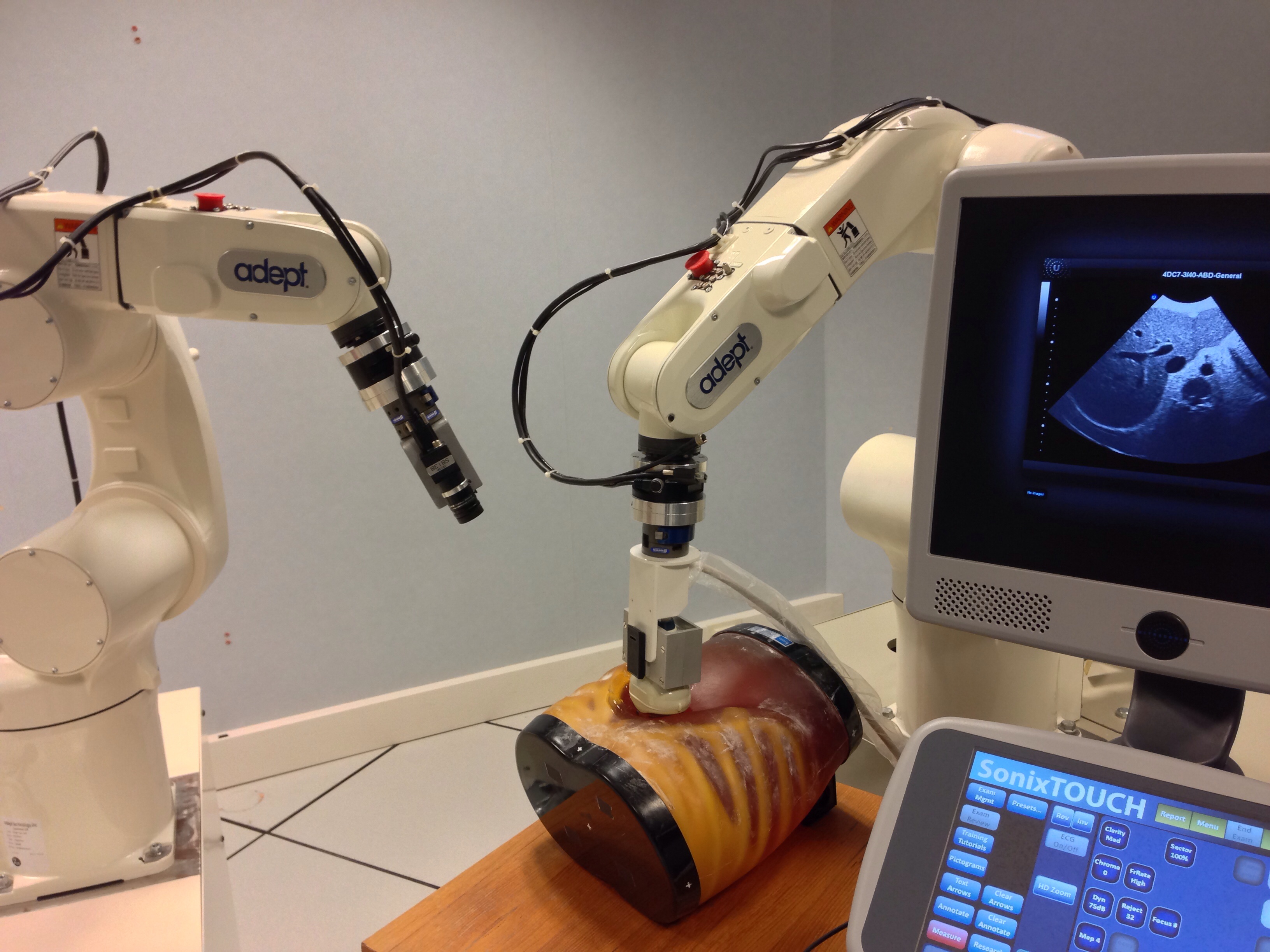 |
| Afma4 cylindrical robot on the left. Afma6 gantry robot on the right. | Adept Viper s650 on the left. Adept Viper s850 on the right. |
Simulated robots
ViSP provides several robot simulators. Some of them are based on real robots such as Afma6 or Viper s850.
Free flying camera
This simulator is pure virtual. Indeed, it represents a free flying camera. There is no joint limit, no singularity. It can be useful to test a new control law and test its convergence. The ViSP class which implements this simulator is named vpSimulatorCamera.
Real robot simutators
We exploit among other an Adept Vider s850 six dof arm and an Afma Robotics gantry robot called Afma6. These real robots can also be simulated. During simulation, their behaviors are as closed as possible from the reality as shown in the following video. As the dynamic model is not taken into account here, there is a shift between the velocity of the robot and the velocity of the simulator.
| Behavior comparison between the real Adept Viper s850 robot and the simulated one. |
The visualisation is based on the wireframe Simulator able to produce an internal and an external camera view. The following video presents a simulation of a visual servoing experiment. The internal image is used to compute the control and then bring the camera mounted on the robot from one position to a desired one.
| Simulation of a visual servoing experiment using the Adept Viper s850 simulator. [source code] |
The two classes that implement these simulators are vpSimulatorViper850 and vpSimulatorAfma6. The following pictures present the Afma6 simulator next to the real robot.
 |
 |